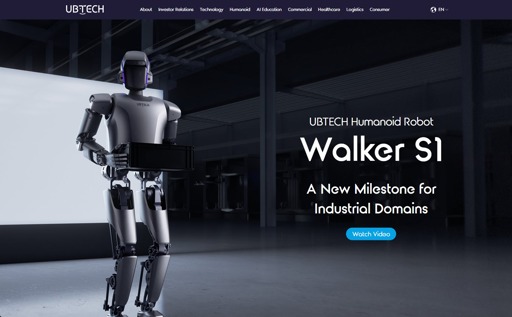
Car factories have had robots for decades. Is there even any practical use for humanoid robots there?
What is the point in a humanoid form factor robot that you can’t have sex with?
Ask those humans who tele-operate some humanoids during the training days…
What’s the point of any machine you can’t have sex with?
The fact that nearly every scene in that video is a 2 second edit suggests that if these are really being used in a factory they are doing none of the things shown in the video IRL.
Given that it’s a humanoid robot, I suspect that this is more of a marketing stunt than any practical deployment of robots.
Humanoid robots don’t make a ton of sense in manufacturing. Why mimic the sub-optimal anatomy of a human when you can make your robotic work slave have any appendage you want, which are designed to be optinal for their task along the assembly line?
Humanoid robots mostly only make sense in spaces that need to be designed for humans (like homes or hospitals) where the robot needs to regularly interact with human infrastructure.
deleted by creator
Because the automated tools are human scale
Even if you rework them all to be fully automatic, you still need a human scale robot to move the work pieces from station to station
There is a difference between human-scale and humanoid.
Human-scale just means the robot needs to fit in a space where humans should also fit, while humanoid means it is supposed to resemble a humans not just in size, but also in shape. A humanoid robot would generally have a torso, two arms, two legs, and probably a head.
As an example, a roomba fits in a human environment but is not humanoid. You could hypothetically make a humanoid robot that is capable of using an ordinary vacuum to vacuum the same space, but it would be significantly more complex and more expensive to do that. A purpose-built roomba is a much more cost-effective solution for cleaning up after humans.
I agree with all that
But what I’m saying is you need a human-scale robot good at moving human scale work pieces to their correct place. These will range in size from something like a screw to something like a human sized sheet
What shape does this better than a humanoid one?
You could specially design a bunch of arms that will remove a workpiece from one station to deliver to the next, but do you have any idea how hard that becomes? You have to design each one to do that specific job, and you’re going to end up with a bunch of unique robots that all need to be maintained, and probably need their own backups in case they break
Everything we make is already human centric, it just does make sense to build humanoid robots. You can have one fleet that handles all of it, they’re interchangable generalists. Ideally, they can even do maintenance
Yes, it’s less efficient. Yes, specialist designs would be better at their job. But it is really, really hard to do full automation, and this is a shortcut to get there
I guess the idea is that humanoid robots ideally require no adjustment to the factory, they can just use the tools made for human workers.
Sure but if you have brand new machines that are supposed to be operated by humans, buying a 10k humanoid compared to paying some real humans is going to appeal a lot of entrepreneurs: and you’ll be able to mix the two kinds of workers initially, see Amazon warehouses as an example.
The training data for a lot of robots comes from tele operation so that form factor is going to stay important for some time. And making the whole plant basically wheelchair accessible isn’t worth it for now. There are variants with a wheeled base but once you add in some balancing for heavier objects and kneeling to pick stuff up it’s not much cheaper.
Not only is this inaccurate, it still doesn’t make sense when you’re talking about a bipedal manufacturing robot.
Like motion capture, all you need to capture from remote operation of the unit is the input articulation from the operator, which is then translated into acceptable operation movements on the unit with input from its local sensors. The majority of these things (if using pre-cap operating data) is just trained on iterative scenarios and retrained for major environmental changes. They don’t use tele-operation live because it’s inherently dangerous and takes a lot of the local sensor inputs offline for obvious reasons.
OC is saying what all Robotics Engineers have been saying about these bipedal “PR Bots” for years: the power and effort to simply make these things walk is incredibly inefficient, and makes no sense in a manufacturing setting where they will just be doing repetitive tasks over and over.
Wheels move faster than legs, single purpose mechanisms will be faster and less error-prone, and actuation takes less time to train.
Can it empty my dishwasher?
From what I’ve seen on other “advanced” humanoid robots, it probably could, using 4-10 times as much time as you would yourself, and breaking a few pieces in the process.
I cannot tell if this is legitimate or some potemkin-esque concept design for a factory